ИССЛЕДОВАНИЕ ОСОБЕННОСТЕЙ МАСШТАБИРОВАНИЯ ЧИСЛЕННОСТИ ГРУППЫ МАЛОГАБАРИТНЫХ МОБИЛЬНЫХ РОБОТОВ ПРИ ЦЕНТРАЛИЗОВАННОМ И ДЕЦЕНТРАЛИЗОВАННОМ СПОСОБАХ УПРАВЛЕНИЯ / SIZE SCALING FEATURES INVESTIGATION FOR GROUP OF SMALL-SIZED MOBILE ROBOTS BASED ON CENTRALIZED AND DECENTRALIZED METHOD OF MANAGING
Введение
С ростом количества эксплуатируемых пользователями роботов актуальным становится исследование управления группами робототехнических аппаратов. Использование большого количества одновременно задействованных роботов особенно характерно для персональных бытовых роботов и спортивной робототехники. Исторически, лучше всего разработаны методы управления группой роботов для обеспечения промышленного производства, но их применение в системах управления мобильными роботами ограничено рядом объективных факторов. Важнейшим из которых является отсутствие возможности строго детерминировать среду и условия функционирования мобильных роботов, исключив учет неопределённостей. Функционирование же роботов в априори неизвестной и недетерминированной изменяющейся среде требует разработки новых методов и алгоритмов управления, а также методов тестирования и отладки полученных решений.
Целью данной работы является исследование зависимостей времени принятия управляющих решений и объёма информационного обмена от параметров группы роботов при централизованном и децентрализованного управлении на примере компьютерной и натурной моделей групп роботов.
Анализируя доступные научные результаты, относящиеся к проблеме группового управления роботами, полученные с помощью компьютерного моделирования и математических методов исследований мы заметили слабое практическое применение известных теоретических результатов.
Как известно каждая группа роботов проектируется из определенных комплектующих и функционирует под управлением своих программных средств, что существенно влияет на их совместную работу над общей задачей. В наших исследованиях мы сопоставляем практический результат, полученный на экспериментальных роботах с результатами, предсказанными в теоретических работах. Это позволяет описать характеристики, уточнить необходимые условия функционирования, разъяснить и подтвердить на практике теоретические предпосылки, функционирования таких систем.
В теоретических работах $[1-3]$ детально рассмотрены проблемы управления большими группами роботов. Авторами указанных работ найдены четыре фундаментальные стратегии управления. Это единоначальная, иерархическая, коллективная и стайная стратегии. Предложена сравнительная оценка времени группового решения при различных стратегиях управления. Обоснована целесообразность проведения дополнительных исследований, создания и эксплуатации групп роботов для применения в промышленности, быту и военной сферах.
1 Методика исследований и описание экспериментальных роботов
Экспериментальные исследования проводились в два этапа. На первом этапе проведены натурные испытания с использованием группы экспериментальных мобильных роботов $[4]$. Группа состоит из восьми роботов и центральной ЭВМ. Каждый робот оснащён радиомодемом XBee Pro, работающим в широковещательном режиме, микроконтроллерной системой управления нижнего уровня и гусеничным шасси с габаритами 150х190х100 мм $($Рисунок 1, а$)$. Внешний вид платы системы управления нижнего уровня с установленным радиомодемом XBee Pro показан на Рисунке 1, б.
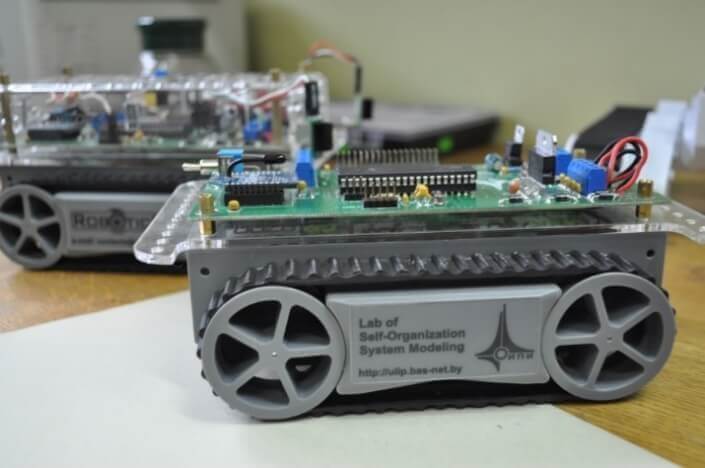
а$)$

б$)$
Рисунок 1 – Прототип мобильного робота для задач группового управления
Система управления нижнего уровня реализует адресный приём пакетов данных от центральной ЭВМ, и исполнение управляющих команд, а также отправку на центральную ЭВМ сенсорных данных.
Центральная ЭВМ оснащена радиомодемом того же типа, что и роботы. Её программное обеспечение позволяет осуществлять информационный обмен с роботами, сохранение данных и формирование команд управления с интервалом в сто миллисекунд.
Для взаимодействия роботов и центральной ЭВМ разработан сетевой протокол, базирующийся на физическом и канальном уровнях XBee Pro и реализующий прикладной уровень модели OSI, а также элементы сетевого и транспортного уровней в объёме, необходимом для управления группой роботов $[5]$.
Использование действующих роботов позволило определить основные соотношения, характеризующие процессы передачи информации в группе роботов. Определены зависимости времени передачи пакета данных от размера пакета, влияние удаления роботов на мощность сигнала $($RSS$)$ и на связанные с этим ошибки передачи, максимально допустимое число одновременно работающих на передачу в широковещательном режиме радиомодемов.
Полученные экспериментальные данные использованы на втором этапе, заключающемся в компьютерном моделировании группы роботов, управляющихся централизованно и децентрализовано. Таким образом предпринята попытка экстраполировать реальные данные на большее число роботов, функционирующих в больших помещениях с более сложной конфигурацией.
2 Результаты экспериментов по передаче данных в группе роботов
Управление роботами осуществляется командным способом, на скорости 19200 бит/с. Отправка управляющих команд роботам осуществляется каждые сто миллисекунд, что является одним тактом системы управления. Однако в связи с особенностями операционной системы Windows реальная скорость информационного обмена центральной ЭВМ с роботами составляет порядка 3200 бит/с, как видно из графика на Рисунке 2. График на данном рисунке показывает время так называемого пинга робота, складывающееся из времени отправки пакета данных, получения его роботом и отправки роботом обратно того же пакте $($эха$)$.
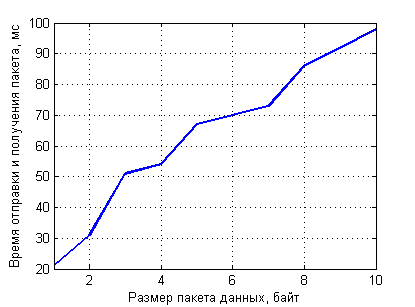
Рисунок 2 – Зависимость времени отклика от робота при разных размерах пакетов $($усреднение по десяти испытаниям$)$
Таким образом, используя текущий протокол, возможно осуществлять управление не более чем десятью роботами за один такт системы управления.
В результате натурных испытаний на действующих моделях роботов была получена зависимость числа потерянных пакетов данных, в процентах, от величины RSS, dBm $($Рисунок 2$)$. Как видно из графика, число потерянных пакетов данных растёт нелинейно с уменьшением мощности сигнала. Измерения проводились при отправке ста пакетов данных с последующим получением ответа $($эха$)$ от роботов и постепенным удалением роботов от передатчика.
Было отмечено значительное снижение числа успешно отправленных пакетов при отдалении роботов на максимально допустимую для радиомодемов дальность $($Рисунок 3$)$
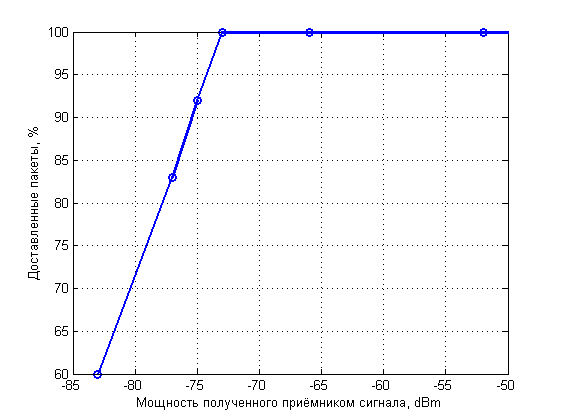
Рисунок 3 – Зависимость количества доставленных пакетов от мощности полученного приемником сигнала
3 План экспериментов по имитационному моделированию
Для количественного подтверждения и корректировки приведенного в $[1]$ графика зависимости времени принятия решения от способа группового управления было проведено имитационное моделирование функционирование группы роботов при двух различных способах управления: централизованном и децентрализованном. Задача моделирования заключалась в поиске искомых объектов в априори неизвестной местности. Моделируемая местность была представлена дискретным полем в виде плоского квадрата размером 256×256 клеток, 20% из которых являлись преградами. Причём размер клеток соизмерим с габаритами мобильных роботов, чтобы они могли беспрепятственно развернуться на месте. Если в качестве прототипа группы роботов использовать указанные выше мобильные роботы, то в эксперименте можно имитировать складское помещение порядка 6 тыс. квадратных метров.
План эксперимента заключался в следующем: 1$)$ установка одного из выбранных способов группового управления; 2$)$ генерация новой карты местности фиксированного размера путём расстановки случайным образом преград; 3$)$ выставление роботов на стартовую позицию – в нижний правый угол дискретного поля; 4$)$ расстановка случайным образом 3-х искомых объектов; 5$)$ запуск функционирования роботов с постоянным подсчётом шагов модельного времени; 6$)$ прекращение моделирования при условии, что в область старта были доставлены по крайней мере два из трёх искомых объекта; 7$)$ увеличение числа членов группы мобильных роботов на одну единицу $($от 1 и до 64$)$.
Под шагом модельного времени понимается такт системы управления предполагаемой системы управления групповыми мобильными роботами как при централизованном, так и при децентрализованном способах управлении. Другими словами, во время каждого шага модельного времени $($такта системы группового управления$)$ в зависимости от выбранного способа управления происходит передвижение фиксированного числа мобильных роботов на одну клетку $($если для этого есть возможность$)$. Искомый объект является найденным и распознанным только тогда, когда любой из роботов окажется с объектом на одной клетке. Таким образом, в моделировании не учитываются временные и вычислительные затраты систем управления членов группы. Результаты моделирования продемонстрируют требования к производительности и характер поведения всей группы.
Для реализации централизованного способа управления был модифицирован ранее предложенный антропоморфный алгоритм $[7]$, который был разработан для точного ориентирования одиночного мобильного робота в пространстве в априори неизвестной местности. Алгоритм был изменён таким образом, что локальные данные сенсорных систем всех мобильных роботов, полученные за каждый такт системы управления, регистрируются в едином вычислительном центре.
В качестве демонстрации работы децентрализованного подхода использовался также ранее предложенный алгоритм на основе аналогии муравьёв фуражиров $[8]$, в котором предполагается, что стая роботов состоит из функционально равнозначных и технически простых и однотипных роботов, действия которых основаны на простых логических правилах.
4 Анализ алгоритмов и результатов имитационного моделирования
На следующих графиках функций приведены количественные показатели результатов проведённых имитационных экспериментов по совместному решению задачи поиска объектов в неизвестной местности $($Рисунок 4$)$. Следует заметить, что на указанном графике к централизованному управлению относятся две функции. Это связано с тем, что в эксперименте была предпринята попытка учесть некоторые физические параметры системы централизованного управления группой указанных выше реальных мобильных роботов, которые естественным образом влияют на эффективность работы всей группы в целом. Как было выявлено при различных реальных испытаниях группы мобильных роботов, самым уязвимым элементом, подверженным внешним воздействиям, является модуль беспроводной связи.

Рисунок 4 – Зависимость числа шагов модельного времени от числа роботов в группе
Первый график функции, относящийся к централизованному управлению, учитывает только зависимость числа полученных системой управления мобильным роботом пакетов данных от расстояния до вычислительного центра. На основании графиков потери пакетов при отдалении роботов на максимально допустимую для радиомодемов дальность на модель были наложены следующие ограничения:- 100% вероятность получения пакетов при расстоянии мобильного робота от точки старта не больше 200 клеток;
- 90% – от 200 до 250 клеток;
- 60% – от 251 до 256 клеток.
Второй график иллюстрирует способ группового управления, в котором учитывалось ещё и конечное число мобильных роботов, которым вычислительный центр может передать управляющие команды. Учитывая практический опыт и указанный выше протокол передачи данных, в проведённом эксперименте принималось, что в каждый шаг модельного времени вычислительный центр может управлять только 10 мобильными роботами.
Для уменьшения статистической погрешности указанных и последующих значений показателей функционирования группы роботов при различных способах управления было проведено 30 измерений каждого из 2×64 опытов.
Рассмотрим результаты децентрализованного способа управления. Как видно из третьего графика, с ростом числа членов группы модельное время, необходимое для выполнения поставленной задачи, постоянно уменьшается, особенно до размера группы в 30 роботов, после которого падение происходит гораздо медленнее. Заметим, что рассматриваемый график функции начинается по оси абсцисс не с единицы. Это связано с тем, что предложенный децентрализованный алгоритм позволяет решить задачу только начиная с 3-х роботов.
На следующем рисунке приведены графики функций, иллюстрирующие зависимость эффективности выполнения поставленной задачи от числа мобильных роботов в группе при различных способах управления, которые были получены путём вычисления обратных значений данных из описанных экспериментов.

Рисунок 5 – Зависимость числа шагов модельного времени от числа роботов в группе
Можно заметить, что при децентрализованном управлении с ростом количества членов группы эффективность растёт практически прямолинейно. При централизованном управлении явна заметна нелинейность из-за введённых ограничений, причём, на втором графике явно заметно влияние пороговой величины, ответственной за максимально возможное число одновременно обслуживаемых роботов.
Заключение
В работе исследованы особенности масштабирования численности группы малогабаритных мобильных роботов при централизованном и децентрализованном способах управления с учетом ряда ограничений связанных со способом передачи команд по каналам связи. Подтверждены, уточнены и разъяснены фундаментальные основы по выбору стратегий управления посредством анализа практических результатов одновременно со значениями, полученными после имитационного моделирования.
Проведённые эксперименты показали, что предложенные алгоритмы централизованного и децентрализованного способов управления позволяют роботам как целостной системе последовательно и методично обследовать всю доступную территорию, даже при выходе из строя нескольких своих членов. Следовательно, конечный результат взаимодействия роботов в группе зависит только от их количества и способностей распознавать искомый предмет. Благодаря тому, что при централизованном способе управления вычислительный центр обладает глобальной информацией о всех исследованных областях карты местности и расположении роботов, это позволяет всей группе действовать более эффективно, чем при децентрализованном управлении. Однако, при достижении определённого количества членов группы производительность централизованного способа управления оказывается не выше, чем при централизованном.
Список использованных источников
- Интеллектуальные роботы: учебное пособие для вузов / И.А. Каляев $[$и др.$]$ ; под общ. ред. Е.И. Юревича. – М. : Машиностроение, 2007. – 360 с.
- Каляев, И.А. Распределённые системы планирования действий коллективов роботов / И.А. Каляев, А.Р. Гайдук, С.Г. Капустян – М.: Янус-К, 2002. – 292 с.
- Каляев, И.А. Модели и алгоритмы коллективного управления в группах роботов // И.А. Каляев, А.Р. Гайдук, С.Г. Капустян – М.: ФИЗМАТЛИТ, 2009. – 280 с.
- Сычёв, В.А. Система централизованного группового управления мобильными роботами / В.А. Сычёв // Электроника Инфо $($рецензируемый раздел$)$. – 2014. - №6 $($108$)$. – С. 40-43.
- Герасюто, С.Л. Разработка протокола и программно-аппаратного обеспечения системы централизованного управления группой роботов / С.Л. Герасюто, В.А. Сычёв // Автоматизация и роботизация процессов и производств: материалы республиканского научно-практического семинара / редкол.: Пантелеенко Ф.И. $($гл. ред.$)$ $[$и др.$]$ Минск : Бизнесофсет, 2014. – 2014. С. 101-102.
- Сычёв, В.А. Способ централизованного управления группой роботов по общему каналу / В.А. Сычёв // Международная научно-техническая конференция, приуроченная к 50-летию МРТИ-БГУИР $($Минск, 18-19 марта 2014 года$)$: материалы конференции. В 2 ч. Ч.1 / редкол.: А.А. Кураев $[$и др.$]$. – Минск: БГУИР, 2014. – С. 304-305.
- Прокопович, Г.А. Алгоритм пространственного ориентирования мобильного робота в незнакомой местности / Г.А. Прокопович // Сб. мат. Междунар. форума студ. и уч. мол. «Первый шаг в науку – 2007». – Минск : «Изд. дом «Белорусская наука». – C. 428-432.
- Прокопович, Г.А. Об одном методе децентрализованного управления группой роботов / Г.А. Прокопович // Робототехника. Взгляд в будущее: материалы Междунар. семинара, Санкт-Петербург, 10-11 марта 2010 г. – СПб : Политехника-сервис, 2010. – С. 199-202.
- Робототехника в Республике Беларусь $[$Электронный ресурс$]$ / Roboticsby. – Минск: 2015. – Режим доступа: http://www.robotics.by/. – Дата доступа: 12.06.2015.