УДК: 629.05:007.52
ПОСТРОЕНИЕ НАВИГАЦИОННОЙ КАРТЫ ВНУТРИ ПОМЕЩЕНИЙ ПО ВЕЛИЧИНЕ МАГНИТНОГО ПОЛЯ ЗЕМЛИ MEMS СЕНСОРОМ МОБИЛЬНОГО РОБОТА
Аннотация
В статье описан прототип мобильного робота для автономного картографирования внутри помещений, приведено описание помещения и методики замеров магнитного поля, показана специальная плата системы управления мобильного робота в составе программно-аппаратной платформы автономного картографирования. Обоснована перспективность использования магнитного поля Земли для навигации внутри помещений.Abstract
Мобильный робот, автономная навигация, картографирование, магнитное поле.Ключевые слова
This paper describes a prototype of the mobile robot for indoor autonomous mapping. Description of the premises and methods of the magnetic field measurements is given, the special card of control system for mobile robot within software and hardware platform for autonomous mapping is presented. Application perspectiveness of Earth's magnetic field for indoor navigation is justified.Key words
Mobile robot, autonomous navigation, mapping, magnetic field.Введение
Одной из актуальных задач, решаемых бортовыми системами управления автономных мобильных роботов, является задача навигации в пространстве. Её суть – анализ ситуации и выбор маршрута самим роботом без участия человека. Одним из наиболее успешных считается метод одновременной навигации и составления карты $($SLAM$)$ $[1]$.Этот метод используется роботами и автономными транспортными средствами для построения карты в неизвестном пространстве или для обновления карты в заранее известном пространстве с одновременным контролем текущего местоположения и пройденного пути. Источником входных данных для алгоритмов SLAM, как правило, являются высокоточные лазерные дальномеры, которые обладают рядом недостатков. Они дороги, потребляют много энергии в работе от встроенной аккумуляторной батареи, издают шум при работе встроенного двигателя. Перечисленные недостатки обуславливают применение альтернативных способов навигации.
Важно отметить, что использование спутниковых систем GPS и ГЛОНАСС для навигации в помещениях неэффективно в связи с тем, что сигнал экранируется стенами и перекрытиями. Конечно, можно ретранслировать сигнал, но это требует дополнительных затрат на монтаж оборудования. Как альтернативный вариант, возможен прием сигналов с уже установленных в помещении точек доступа WiFi. Поэтому альтернативным способом привязки является использование в качестве источника информации геомагнитного поля Земли. По магнитным полям ориентируются многие представители животного мира, например, лобстеры, птицы и морские черепахи. Они чувствуют естественное магнитное поле Земли, а также его локальные изменения, вызванные различными аномалиями.
В данной работе предложена и реализована система навигации мобильного робота на основе смартфона Samsung GT-S7710, оснащённого сенсором MEMSHSCDTD008A $[2]$, с помощью которого была построена магнитная карта помещения и оценена возможность навигации по ней.
Прототип мобильного робота для автономного картографирования внутри помещений
На рисунке 1 показан экспериментальный мобильный робот, предназначенный для автономного картографирования внутри помещений. В основе его системы управления лежит разработанная сотрудниками сектора робототехники ОИПИ НАН Беларуси плата управления нижнего уровня, реализующая управление электродвигателями, обработку сенсорной информации от различных датчиков, а также связь с центром управления по беспроводному каналу.

Рисунок 1 - Прототип мобильного робота для задачи автономного картографирования внутри помещений
Рассмотрим принципы работы описанной платы системы управления нижнего уровня, которая имеет геометрические размеры формата PC/104 для встраиваемых систем и роботов $($рисунок 2$)$.

Рисунок 2 - Плата управления нижнего уровня формата PC/104 для встраиваемых систем и роботов
Характеристики сенсора магнитного поля, модель помещения и описание методики измерений
Подробные характеристики использованного сенсора магнитного поля приведены в $[2]$. Для нашего эксперимента важен такой параметр сенсора, как чувствительность, которая составляет 2,4 мкТл по трем осям измерений. Естественный магнитный фон на поверхности Земли составляет 30-60 мкТл, но он может значительно отличаться в зависимости от залежей руд, например, в зонах геомагнитных аномалий Сибири.
Для измерений было выбрано помещение лаборатории института в кирпичном здании. На чертеж помещения наложена сетка с шагом 0,5 метра $($рисунок 3$)$.
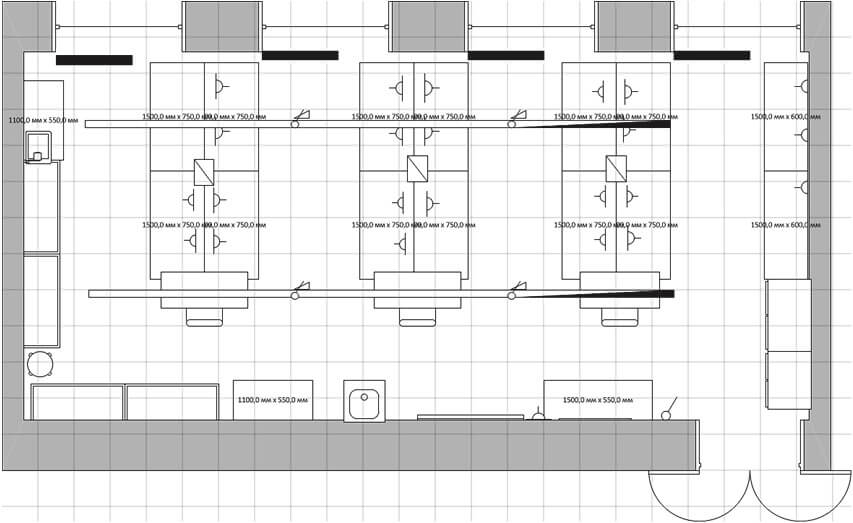
Рисунок 3 – Чертеж плана помещения лаборатории
С помощью сенсора смартфона в отмеченных точках на карте, были проведены измерения $($рисунок 4$)$. Для каждой пространственной точки проводилось 4 измерения при повороте сенсора на 90 градусов. Полученные данные обрабатывались с использованием CASMathematica 9.
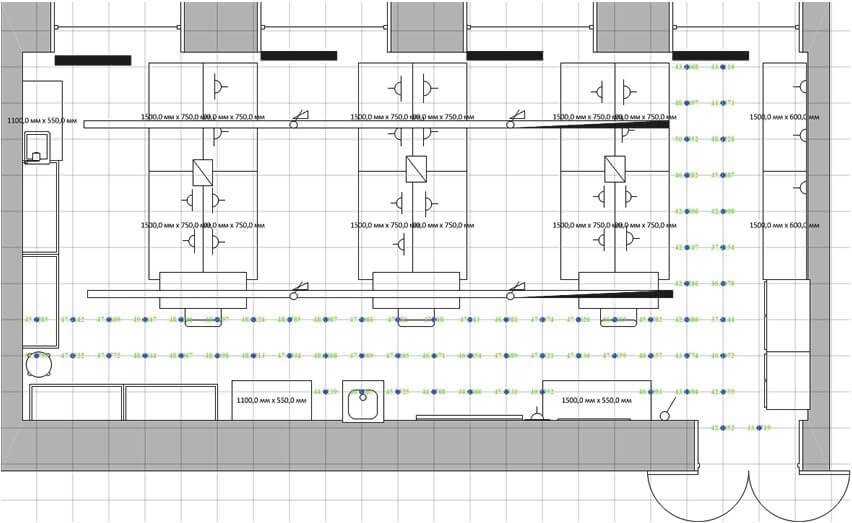
Рисунок 4 – Чертеж плана помещения лаборатории с нанесёнными точками замеров и усредненным значением величины магнитного поля для одной ориентации
Полученные замеры были представлены в виде текстовых файлов с разметкой данных по спецификации json, специально подписанные с привязкой к точкам сетки эксперимента. Таким образом, данные, полученные от сенсора смартфона, записывались на внутреннюю карту памяти через специально разработанную для этих целей программу на языке JAVA. Смартфон функционировал на основе программной платформы Android
Экспериментальные результаты
Для проверки возможности навигации на основе дискретных величин сетки магнитного поля был поставлен следующий эксперимент: МР с установленным на борту сенсором двигался по заранее известному маршруту, а данные его замеров затем были сопоставлены и после предобработки наложены на карту с учетом ориентации. Значения полученных замеров, а также прорисованный путь движения робота представлены на следующих графиках $($рисунки 5 и 6$)$.


Рисунок 5 - Изменение величины магнитного поля по оси X $($а$)$ и Изменение величины магнитного поля по оси Y $($б$)$

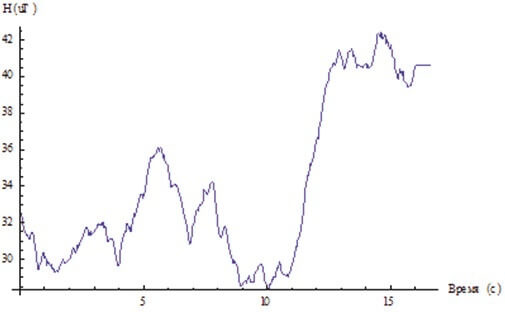
Рисунок 6 - Изменение величины магнитного поля по оси Z $($а$)$ и величина магнитного поля H $($б$)$
Для наглядности результата на рисунке 7 вычисленную траекторию для точек с максимальной вероятностью $($синяя линия$)$, выделяем подобные точки $($зеленый цвет$)$. Полученная траектория повторяет реальный путь робота в лаборатории в целом, но содержит ряд неоднозначностей.
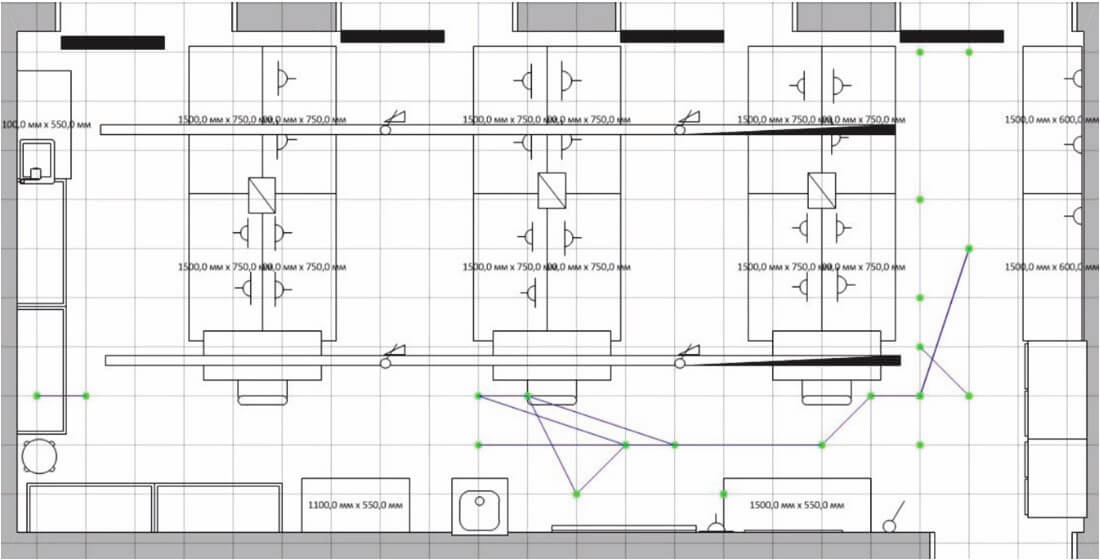
Рисунок 7 - Траектория пути мобильного робота
В результате была показана возможность использования магнитного поля Земли для навигации внутри помещений. Таким образом, представляется перспективным оснащение сенсорных систем мобильных роботов, работающих в помещениях, датчиками магнитного поля Земли для комплексирования с уже применяемыми способами навигации $[3]$.
Заключение
В работе описывается прототип мобильного робота для автономного картографирования внутри помещений, приведено описание помещения и методики замеров магнитного поля, показана специальная плата системы управления мобильного робота в составе программно-аппаратной платформы автономного картографирования. Обоснована перспективность использования магнитного поля Земли для навигации внутри помещений.
Работа выполнена при поддержке БРФФИ, договор №Ф13К-144 «Разработка и исследование алгоритмов поведения стайных роботов для поисково-исследовательских работ» $($2013-2015 гг.$)$ и портала http://www.robotics.by $[4]$.
Список использованных источников
- Рассел, С. Искусственный интеллект: современный подход / С. Рассел, П. Норвиг. − М.: Издательский дом «Вильямc», 2006. − 1408 с.
- Compact Geomagnetic Sensor with Wide Dynamic Range $[$Электронный ресурс$]$ / ZETTLER electronics GmbH – Режим доступа: http://www.zettlerelectronics.com/pdfs/sonstige/ALPS_HSCD_E_Flyer_2013.pdf.– Дата доступа: 30.01.2014.
- Интеллектуальные роботы: учебное пособие для вузов / И.А. Каляев $[$и др.$]$ ; под общ. ред. Е.И. Юревича. – М. : Машиностроение, 2007. – 360 с.
- Робототехника в Республике Беларусь $[$Электронный ресурс$]$ / Roboticsby. – Минск: 2013. – Режим доступа: http://www.robotics.by/articles.html. – Дата доступа: 12.06.2014.