The Third Open Seminar on Robotics was held on the basis of State Technical University in Brest
Hospitable organizers gathered within the frameworks of the Seminar robotics practitioners to discuss topical issues in contemporary robotics. Such an event was held with the participation of the University for the third time already. The Department of Intellectual Information Technologies enthusiastically took the role of the event organizer.
The representatives of the Brest State Technical University Artificial Intelligence Laboratory, Robotics Department, their colleagues from the United Institute of Informatics Problems of the National Academy of Sciences of Belarus, and guests from Ternopol (Ukraine) were among the main participants of the Seminar.
After an exhibition was displayed, the participants continued with a conference, exchange of opinions, insights and methods on developing solutions within typical problems in robotics.
The discussion touched upon the following topics:
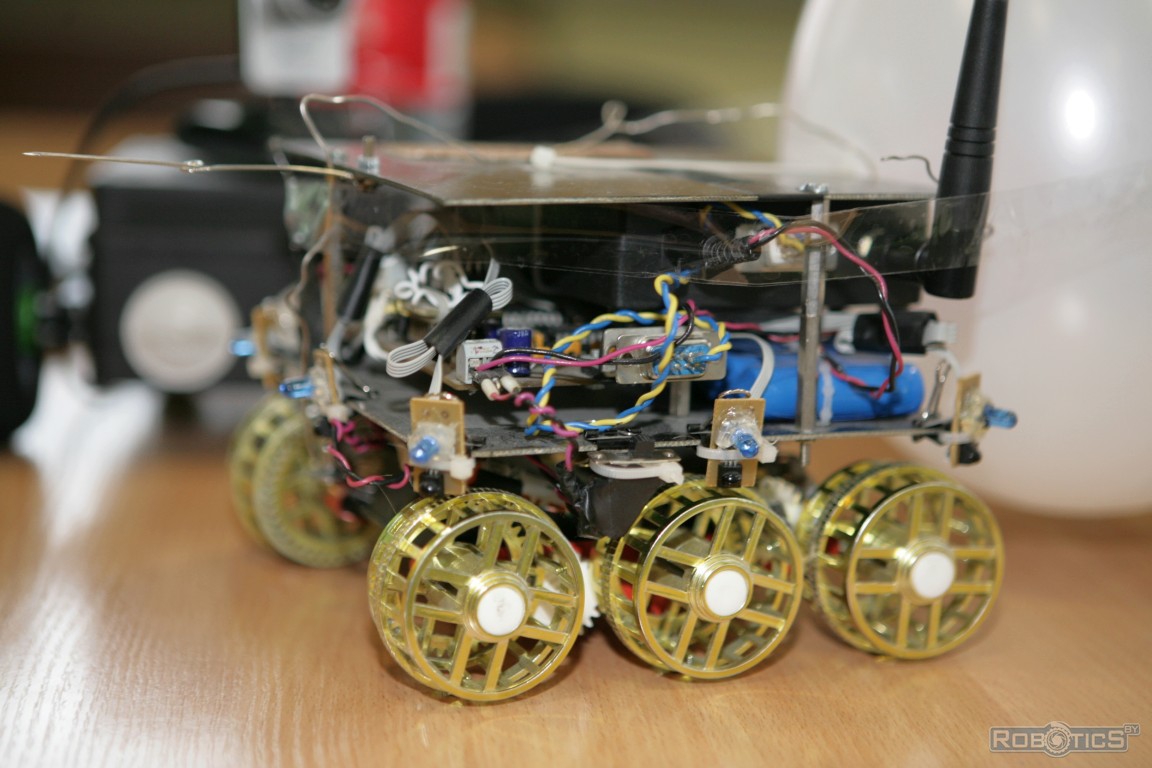
Choosing power supply system for a mobile robot. Autonomous mobile robot based on self-charging platform. Mobile robots batteries. The most appropriate accumulator and its charger creation. Experience in using ready sets of charger / accumulator. Optimal power conversion for onboard robots systems, with the highest efficiency DC-DC.
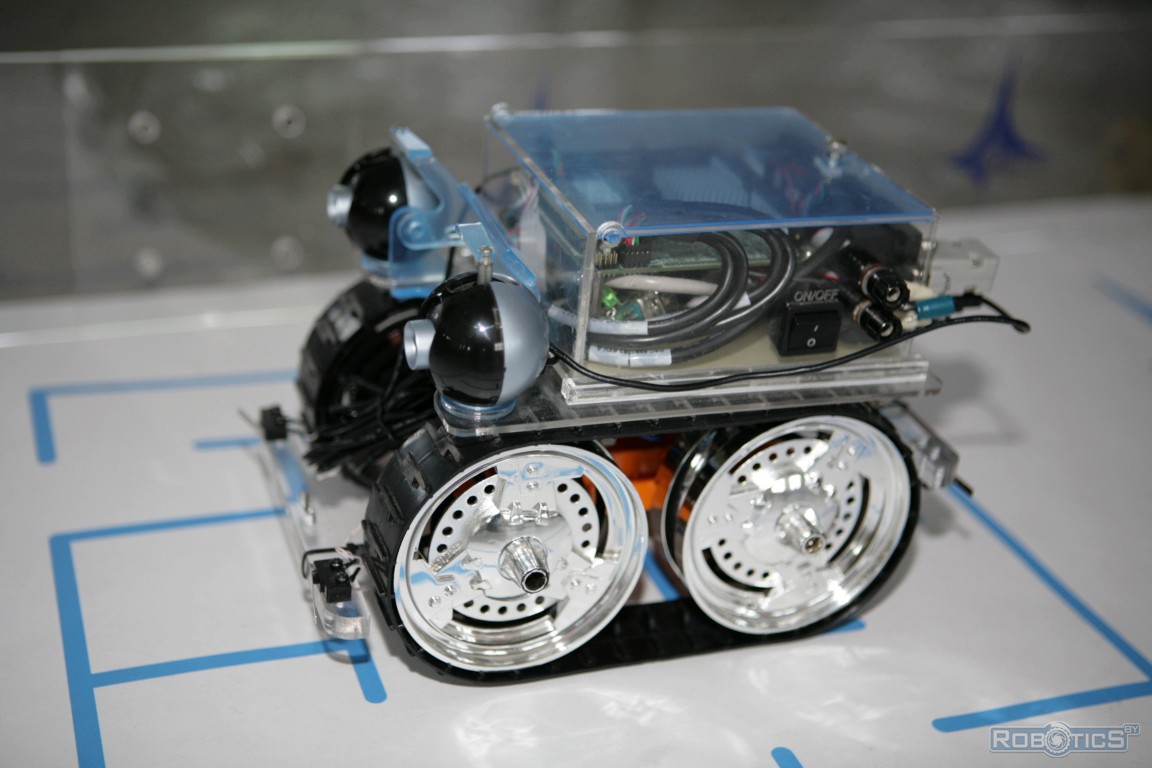
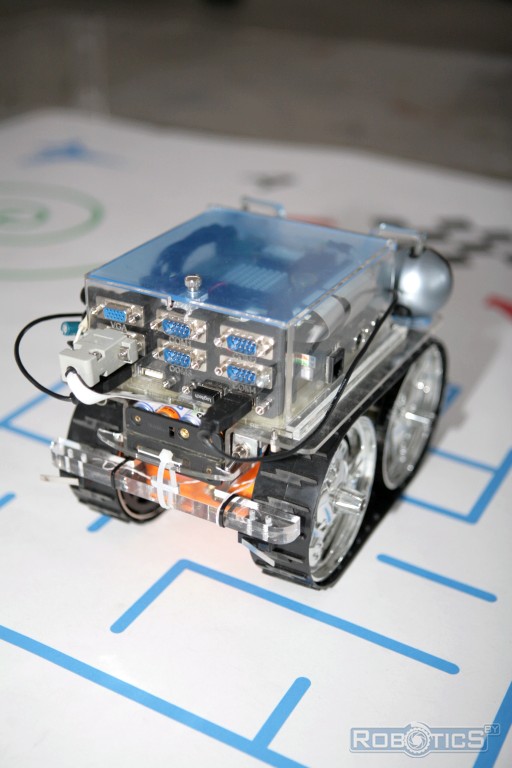
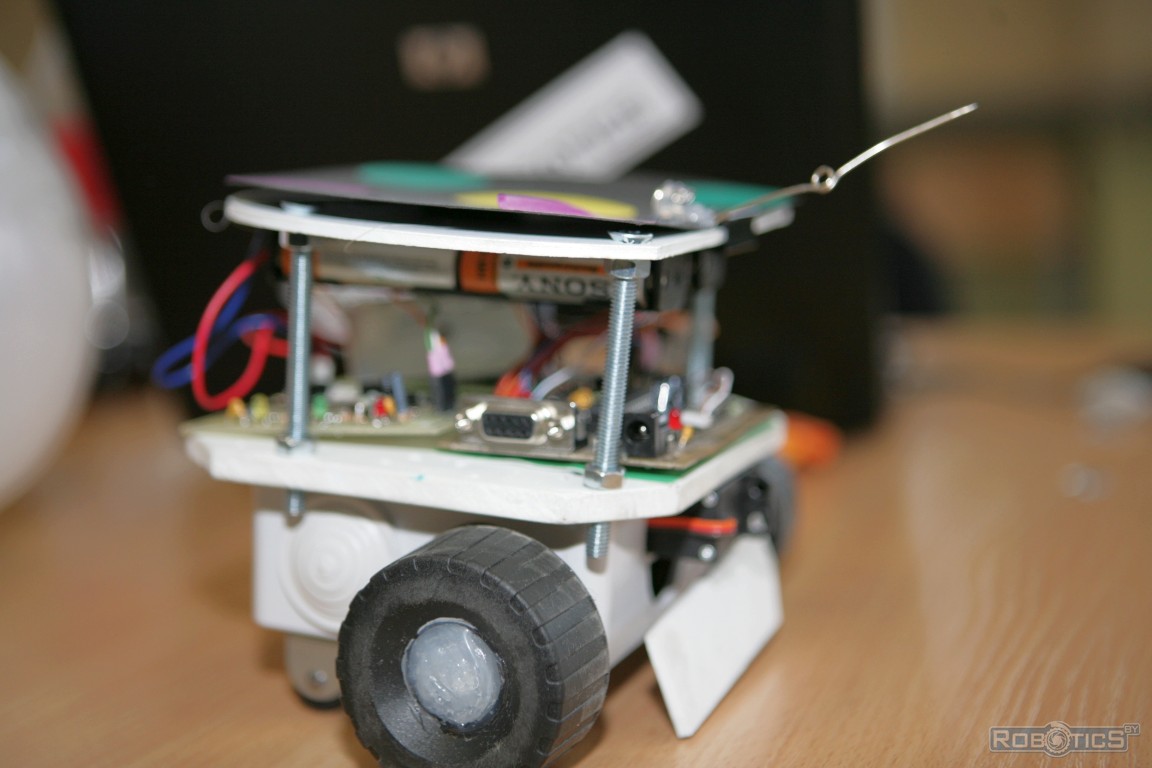
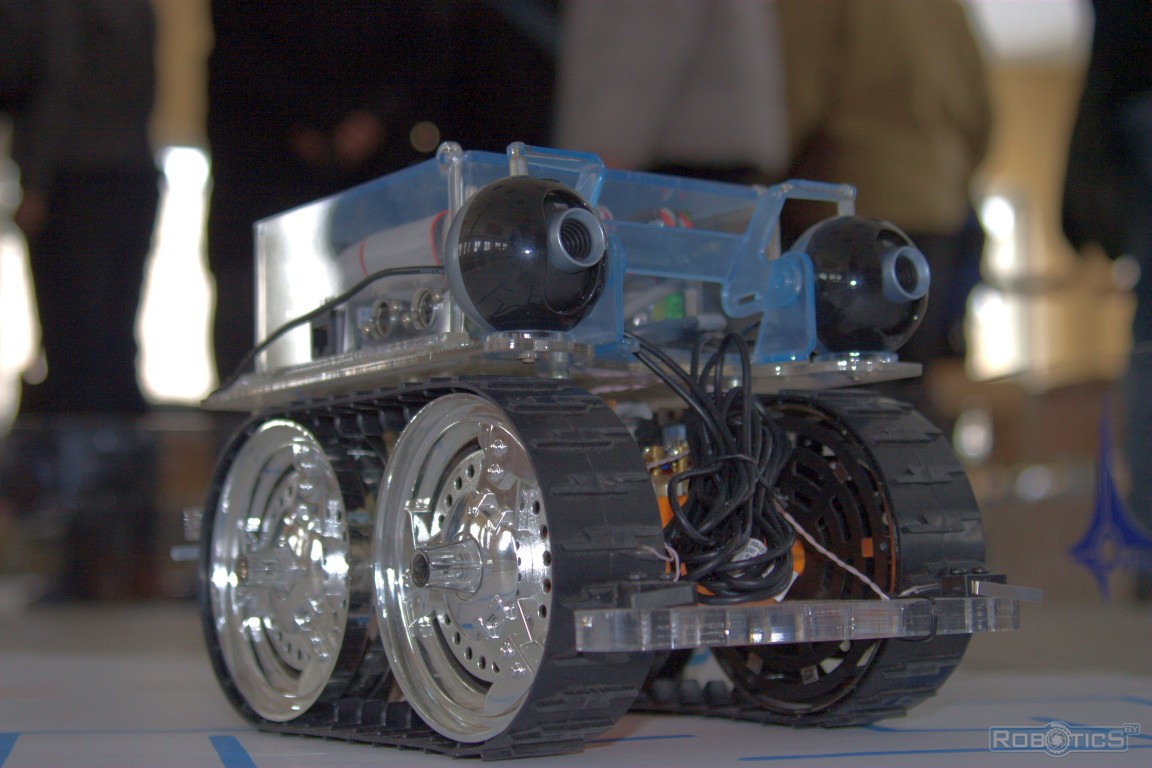
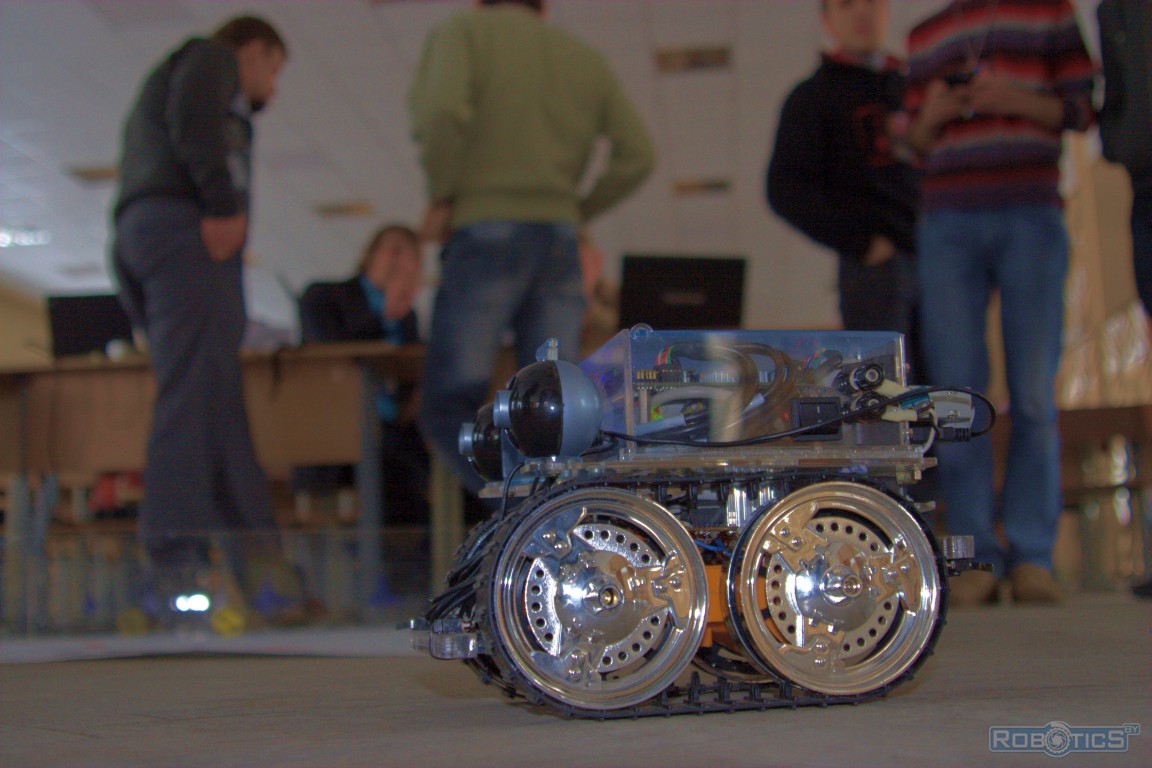
Choosing between mobile robots wheeled or tracked chassis. Non-standard wheeled (3 wheels) optimal control methods. The lowest level driving gear and control systems. Completed universal and specialized (racing robot control board) solutions.
Mobile robots sensors. Choosing laser scanning range finder. Gyroscopes and accelerometers operating features. Electronic compasses. Ultrasonic and infrared distance sensors. Special sensors (radiation level sensor). Their integration with onboard systems.
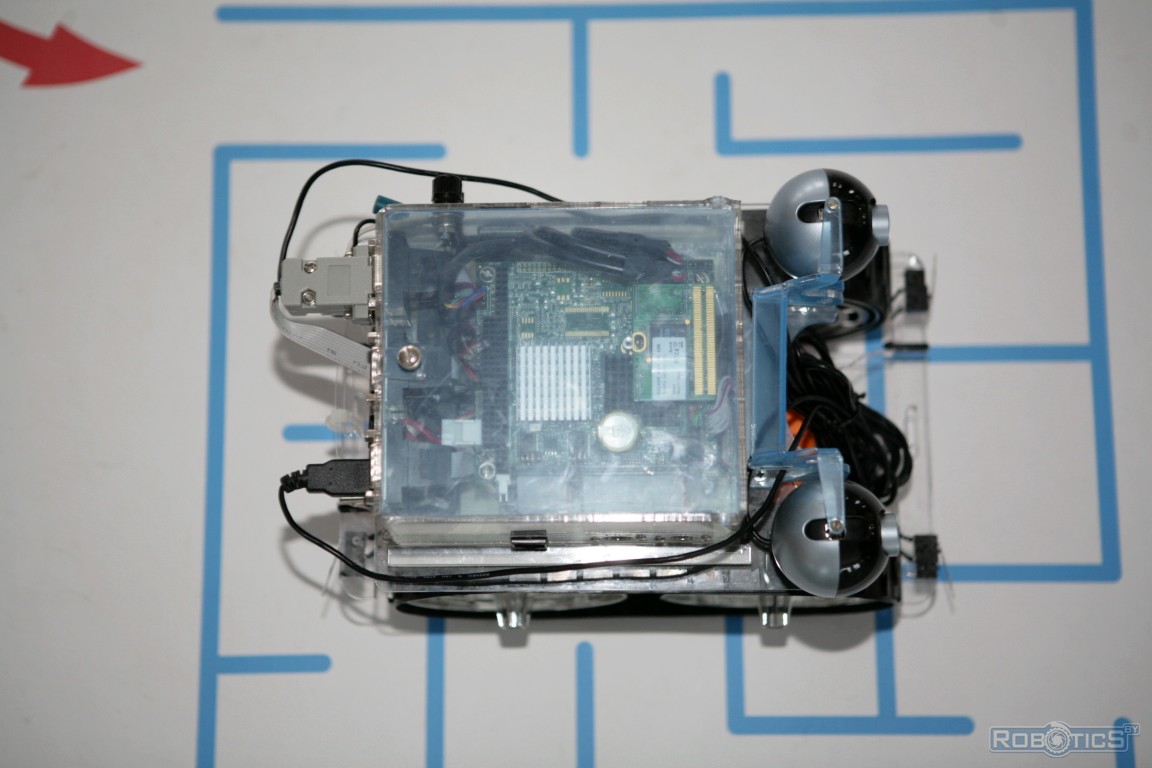
The upper level mobile robot onboard management system. Choosing an optimal performance and consumption management system. Operating system for a mobile robot.
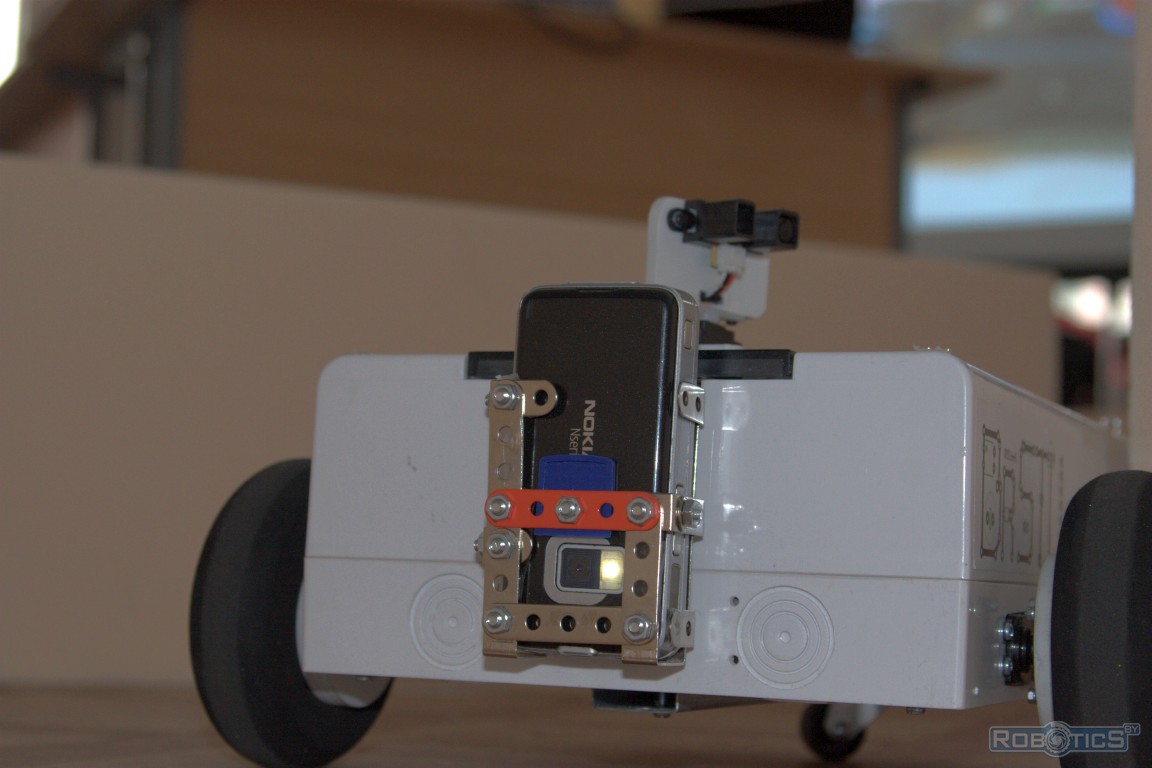
Mobile robots remote control. Robot operating through Internet / Ethernet connection cases. Special radio signals for robot control.
Robot control center. Mobile robots group control problems. Typical situations of interaction between robots (pass one another in the robot arena labyrinth).