28.01.2012 In the city of Brest was the next stage of the competition of autonomous mobile robots
We congratulate the winners of the competition - the team Fotonika-31 from the city of Lviv.
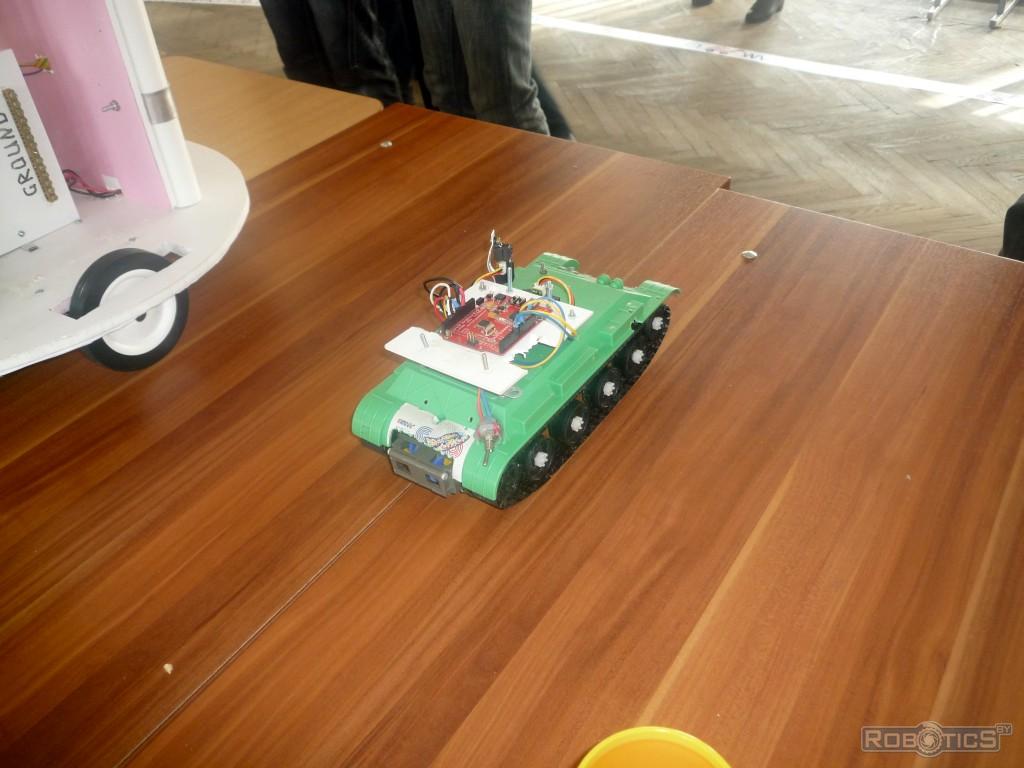
The team of robotics.by took part in the demo section of the competition. The viewers were demonstrated the features of the onboard control system of mobile robots of lower level. That is, this system was entrusted to control well-coordinated work of two DC motors, survey of analog sensors, communication with the onboard computer in real time. The system is a part of the prototype platform for autonomous mapping, in development of which we are engaged. The possible options for motion control for the platform were discussed with colleagues in robotics and related experts.
Features of mapping using autonomous mobile robots.
Mapping for a mobile robot is one of the continuous process of collecting and analyzing information on the environment to construct maps of the robot's working zone and to use it for navigation.
If several mobile robots are located in the same zone, they are implied to exchange maps among themselves. In stand-alone mapping using mobile robots, it is very important to be able to precisely control the robot's movement and rotation around its axis for its maximum precise binding and for reducing errors of sampling the region of space. Digitization is done with different sensors: laser scanning range finder, infrared range finder, ultrasonic distance detector. It is additionally combined with a picture from high-resolution cameras. Reverse control of action and the position of the mobile robot in space is produced by the readings from the combined electronic gyroscope / compass. In our control system of the lower level the proportional internal differential controller (PID) is realized for the speed control of DC motors. This is possible only in the case of the analysis of data from motor encoders.