21.05.2016 21 мая 2016 года мы завершили ходовые испытания перспективных гусеничных шасси в лабораторных и полевых условиях.
Сектором робототехники ОИПИ НАН Беларуси завершен комплекс работ по испытанию перспективных систем дистанционного управления, электрохимического источника тока и гусеничных шасси в лабораторных и полевых условиях.
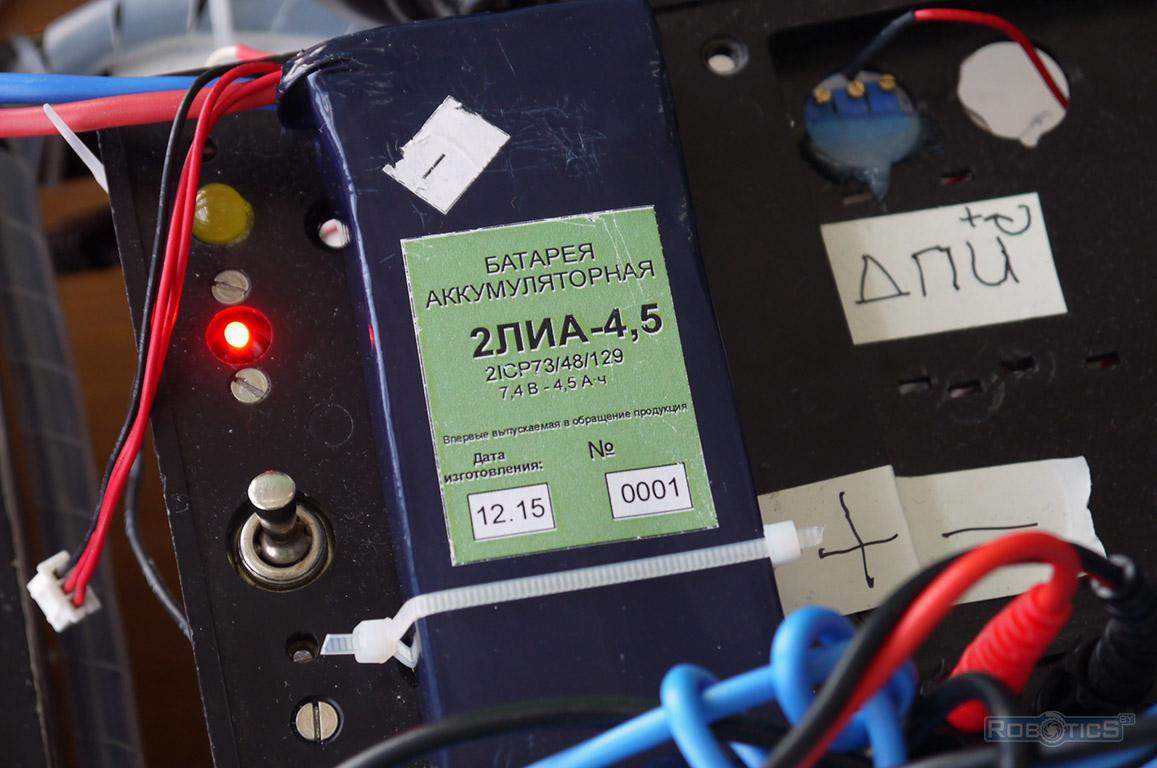
Шасси предоставлены Евдокимовым Дмитрием, экспериментальный источник тока (Li-Po аккумуляторная батарея), специально разработанный АО "Энергия", г. Елец, для использования в робототехнических аппаратах и устройствах нуждающихся в качественном обеспечении питанием.
Испытания охватили типовые ситуации при работе робота внутри помещений и на улице в условиях максимально приближенных к эксплуатационным.
Потребность в таких исследованиях и испытаниях связана с тем что для мобильных роботов с грузоподъемностью менее 200 кг существует большое количество технических решений по сравнению с роботами большей грузоподъемности. Еще одной проблемой является масштабирование технических решений при сохранении модульного принципа построения робототехнических аппаратов.
Робототехникам-практикам постоянно приходится быть в поиске оптимального сочетания технических решений по каждому компоненту робототехнических аппаратов.
Для себя мы видим необходимость такого поиска и исследований по типам шасси, системам управления с учетом технологий искусственного интеллекта, источникам тока, механизмам взаимодействия и интерфейсу робот-робот и робот-человек.
По результатам испытаний мы планируем провести доработки и улучшения существующих решений.