28.01.2012 В городе Бресте прошел очередной этап соревнований автономных мобильных роботов
От всей души поздравляем победителей состязания - команду Fotonika-31 из города Львова.
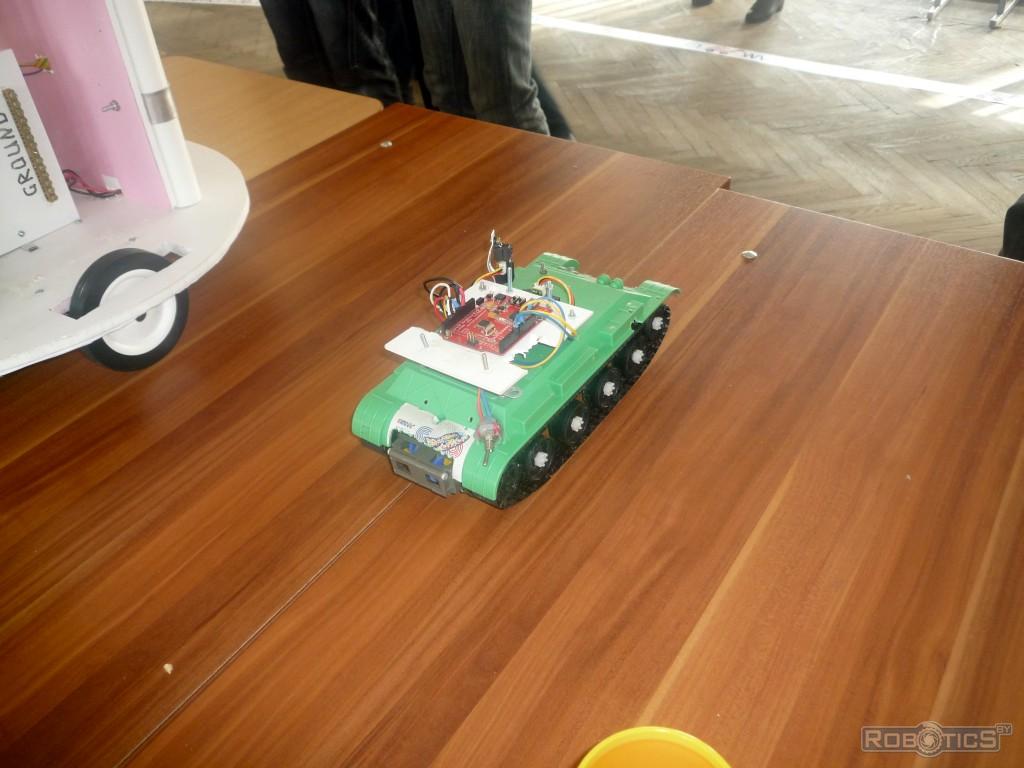
Команда портала robotics.by приняла участие в демонстрационной секции соревнований. Зрителям были продемонстрированы особенности работы бортовой системы управления мобильными роботами нижнего уровня. То есть этой системе управления доверена слаженная работа двух двигателей постоянного тока, опрос аналоговых датчиков, передача информации в бортовой компьютер в режиме реального времени. Она входит в состав прототипа платформы для автономного картографирования, разработкой которой мы занимаемся. С коллегами робототехниками и специалистами в смежных областях были обсуждены возможные варианты управления перемещениями для этой платформы.
Особенности автономного картографирования с использованием мобильных роботов.
Картографирование для мобильного робота - один из непрерывных процессов сбора и анализа информации об окружающей среде для последующего построения карты рабочей зоны робота и навигации по ней. При наличии на объекте несколько мобильных роботов подразумевается обмен "картами" между ними.
При автономном картографировании с использованием мобильных роботов важно иметь возможность очень точно управлять перемещением и поворотом робота вокруг своей оси для его максимально точной привязки и уменьшения погрешностей оцифровки исследуемой области пространства. Оцифровка производится разными сенсорами: лазерным сканирующим дальномером, инфракрасным дальномером, ультразвуковым детектором расстояния. Дополнительно предусмотрено совмещение с картинкой от камеры высокого разрешения. Обратный контроль действий и положения мобильного робота в пространстве производится по показаниям совмещенного электронного гироскопом/компасом. В нашей системе управления нижнего уровня реализован пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор) для управления скоростью двигателей постоянного тока. Такое возможно только в случае анализа данных энкодеров двигателей.